

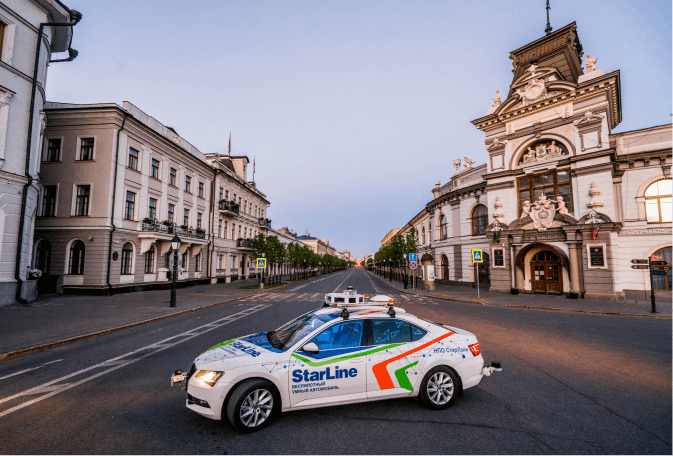
In December 2019 during the final stage of the Up Great «Winter City» contest, Russian developers tested their unmanned vehicles at a training ground in winter conditions. A team from St. Petersburg showed the best result: the StarLine car drove 50 km in 4 hours with «penalty» minutes included. Boris Ivanov, Head of the «Smart Car» department at StarLine, spoke about his technological miracle and the future of the unmanned vehicle industry in Russia.
The Technology
The Technology
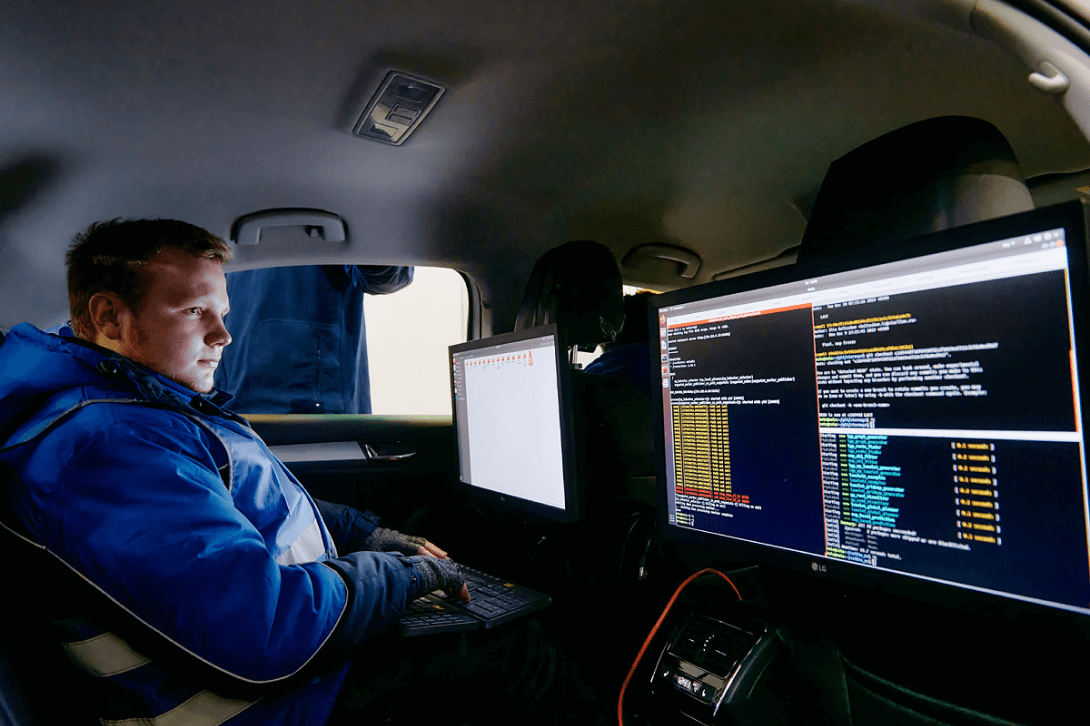
Modern self-driving cars are essentially data centers on wheels with a large number of powerful computers. Our StarLine unmanned car is equipped with a set of sensors and several computers. As of now only one specific computer is installed in the vehicle. This computer monitors all other nodes and the overall operation of the car in case some of the nodes fail. The rest of the computers are equipped with powerful graphics cards.
For our work we use ordinary, basic computers, specialized ones are not needed. It is simpler and cheaper this way. Also this significantly speeds up the development process, because using ordinary computers allows us to run more tests quickly and inexpensively.
Tens of millions of rubles have already been invested in the project, two million of which were spent to buy the car. The most expensive components are the sensors.
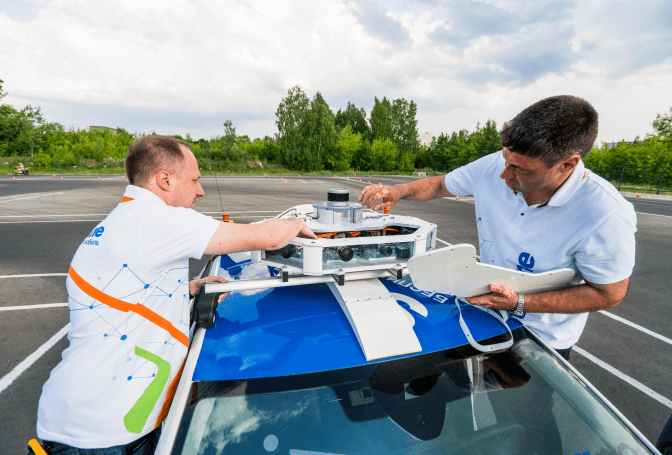
The sensors we selected have different physical principles. This ensures their stable operation in various weather conditions, like rain, snow or fog. Each sensor has its own strengths and weaknesses. That is why we apply the Sensor Fusion approach, which basically means that we use the strengths of one sensor to compensate for the shortcomings of another.
Street lighting creates some additional challenges. The dynamic range of modern cameras is lagging behind the capabilities of the human eye. To solve this issue, we use data fusion, i.e. data from several cameras with different exposure compensation parameters. Using appropriate software filters we have no problems with reflective surfaces such as puddles.
Modern self-driving cars are essentially data centers on wheels with a large number of powerful computers.
«Winter City» contest
At the end of 2019, our team showed a very good result in the Up Great «Winter City» contest. The main task of the contest was to drive down the Russian winter road with safety level and speed of an ordinary driver, observing traffic rules in a dense urban area. More than 30 applications were sent from all over Russia and five teams participated in the final mass start. Our car was able to drive 50 km of the most difficult city route in 4 hours. This includes the extra «penalty» minutes that were added for traffic rules violations.
Such contests expedite the development of technology. First of all, you have to take into account the motivational factor for engineers and programmers and the competitive moment that comes with it. In our case the main competitors were not the other teams, but the technological barriers we faced. On the contrary, the teams we met became our partners and we continue to cooperate with them.
We managed to create a community of professionals. Thanks to this contest it actually brought the developers together.
We believe it is important to join efforts. For example, on March 12, we held a conference in St. Petersburg that brought together leading Russian developers of unmanned vehicles and automotive industry experts. The main topic of the meeting was based on studying the ways of creating a digital road model and V2X technologies. My colleagues and I tried to explain what a single standard of a digital road model should look like so that it can be applied to any Russian unmanned vehicle.

The sensors we selected have different physical principles. This ensures their stable operation in various weather conditions, like rain, snow or fog.
Necessary infrastructure
According to analysts at PwC, a complete unmanned transport infrastructure, which will be devoid of any human drivers, will appear in large cities by 2040. Our assumption is that this will happen much earlier.
Because self-driving vehicles are scarce in numbers, they can do without the infrastructure. But the closer we get to the point where their use will be widespread, the more important the infrastructure will become.
First of all, such infrastructure will be implemented for in-plant logistics and transportation of (quarry) machinery. If we’re talking about public roads, then this work is already underway.
Right now it is important to develop common requirements for digital maps for unmanned vehicles. Such maps must be highly accurate. Information about the situation on the roads should be constantly updated, so that autonomous vehicles receive the latest data on traffic jams, roads that are under construction and so on.
There are projects on implementing unmanned vehicles in in-plant territories. Our company is involved in such projects. First of all, we are talking about cargo and passenger transportation in closed territories. For such purposes StarLine unmanned technologies as a commercial product are already entering the market.
By 2025 the market for unmanned vehicles will grow*
$1,3 billion
$84 billion

By 2025 the market for unmanned vehicles will grow from $ 1.3 billion to $ 84 billion. Sales of autonomous cars in absolute terms will reach 36 million units. Sales of cars that are equipped with autonomous driving systems will exceed 40% of the global market for new vehicles. Vigorous implementation of autonomous taxis and increased use of business mobility models in the transport system of large cities will enhance the development of unmanned systems and technologies.
The future of StarLine
We can take almost any vehicle and turn it into a self-driving car. Typically, a Prius is used for such unmanned car experiments due to the convenient location of its control (wheel). But the Prius is not officially exported to Russia. Those who use them for their experiments usually bring in used cars from abroad, often with a range of different problems. For our development needs, we chose a vehicle that is popular among Russian car owners and has a set of parameters that are acceptable to us. One of the reasons being that since it has electric power steering, we do not need to install additional actuators.
The company is ready to begin testing its unmanned vehicle on public roads. We prepared the car for certification, conducted the first inspection at the Test Center of FSUE NAMI (leading Russian scientific organization that deals with developing the automotive industry), designated the necessary tests for the car. Even though we’re ready to move forward, the process had to be postponed due to the COVID-19 pandemic. After the situation comes back to normal, we will continue the certification process. We believe that this will take 1-2 weeks, depending on the workload of the Test Center. After that, we will begin testing the unmanned vehicle on the roads of St. Petersburg.
*From The Report on the prospects of the unmanned vehicles market development made by RVC in cooperation with the consulting company Frost & Sullivan



